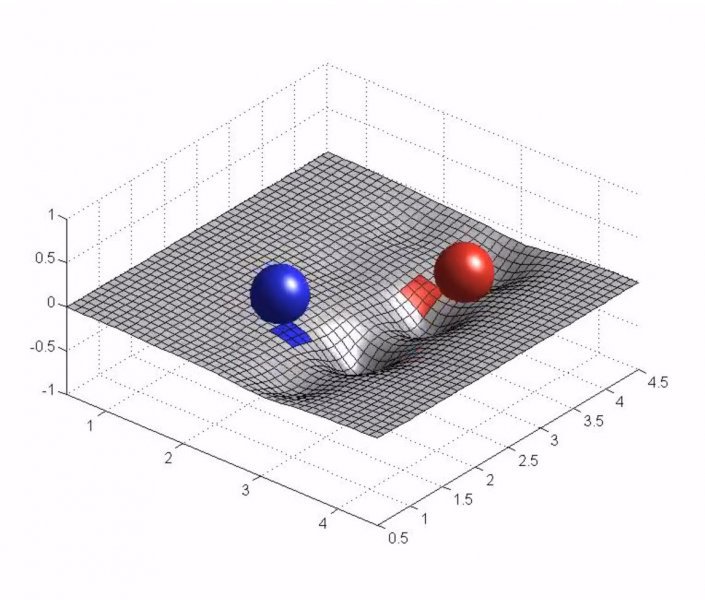
Představte si, že na vrcholky kopců v krajině položíte kuličky. Není těžké uhodnout, co se pak stane: Vlivem zemské přitažlivosti se každá kulička začne koulet z kopce dolů, přičemž o její dráze – o tom, kam se bude koulet, jak bude zatáčet a kde se nakonec zastaví - rozhodne tvar krajiny – srázy, terénní vlny, údolí, sedla – pod kopcem, na jehož vrchol jsme ji na začátku položili. Není to tedy tak, že pohyb kuličky řídí právě tvar krajiny? Že vlastně velmi přirozeně řídí pohyb všech kuliček v krajině, a to všech najednou?
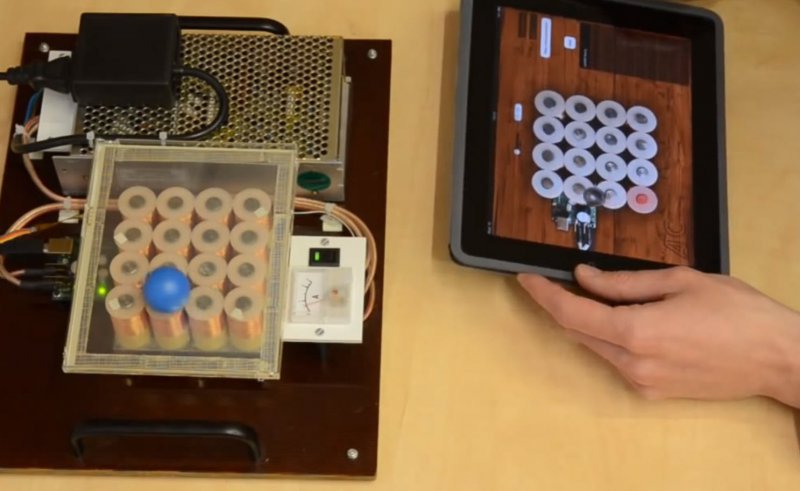
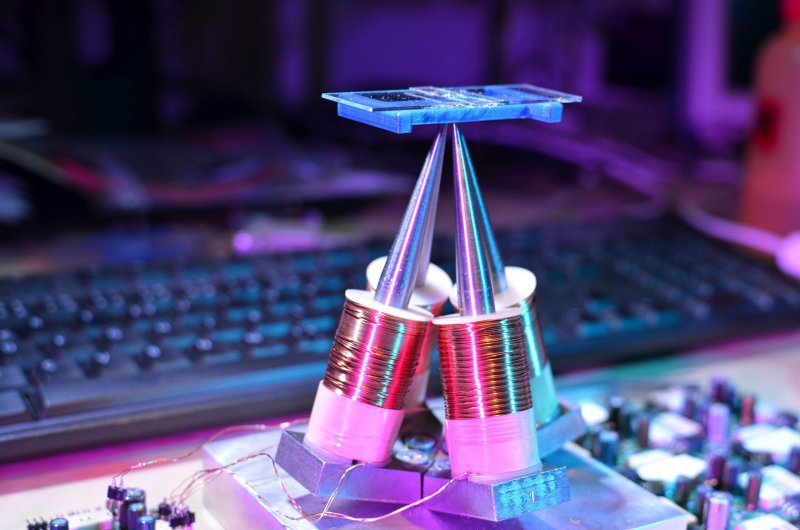
A teď si představte, že kuličky rozmístíte na desku svého stolu. Pokud je deska rovná a vodorovná, nestane se nic. Kuličky budou v klidu, nikam se koulet nebudou. Jak máme přemístit kažou kuličku jim, na přesně pro ni určené místo? Jak to udělat se všemi nejdnou? A pokud možno, aniž bychom se jich něčím dotkli. Což takhle vytvarovat vhodně stolní desku, vytvořit pro každou kuličku příhodný kopec, svahy a údolí kolem něj? Jinak řečeno, nešlo by vytvořit na desce jakousi krajinu, po které by se kuličky samy pohybovaly? Nebo jen nějak pozměnit gravitační pole? Ani jen dodnes bohužel neumíme. Tak proč nepoužít nějaké jiné pole, třeba elektrické nebo magnetické. To by snad šlo vytvarovat – utvořit z něj krajinu – pomocí řízených elektrod nebo magnetů. A takhle přesně na to naši kluci šli – a po pár letech usilovné a nápadité práce mají první skvělé výsledky a začínají tím být docela slavní po celém světě.
Naposledy dostali Jiří Zemánek, Zdeněk Hurák a Sergej Čelikovský prestižní ocenění EEA Demonstrator Paper Prize za prezentaci článku o řídicím systému pro magnetickou manipulaci. Ocenění uděluje a sponzoruje francouzský klub EEA profesorů a vědců v oblasti elektrických a informačních věd za nejlepší prezentaci vědecké práce na světovém kongresu IFAC formou článku a živé demonstrace. Více se dozvíte na stránkách oddělení AA4CC katedry řídicí techniky. A další cena je na spadnutí, ale zatím o ní nebudeme mluvit, abychom to nezakřikli ;).

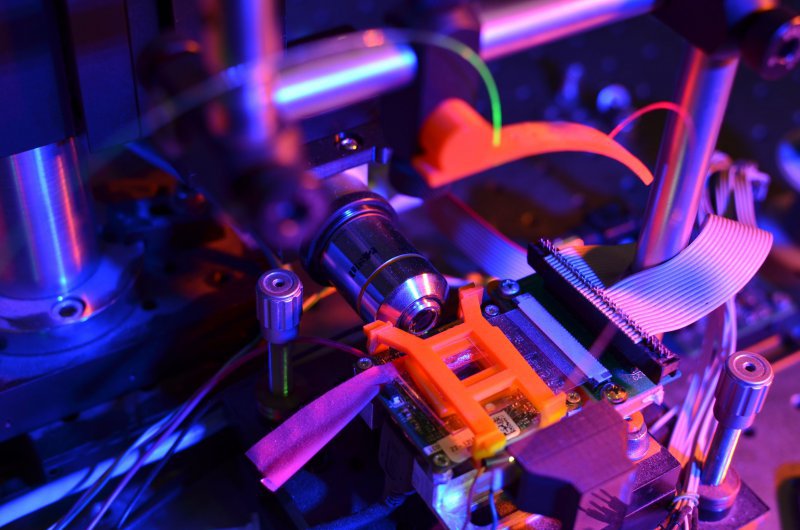
K čemu je to dobré? Když je to z principu bezkontaktní, tak jistě pro něco měkkého, co nesmíme dotykem porušit nebo rozbít: vajíčka při umělém oplodnění, jiné buňky v laboratoři – nejprve v laboratoři, ale později snad i v lidském těle. A hýbe to přesně mnoha objekty nejednou? A což takhle jednou na dálku pohybovat nanoboty v lidském těle?
Chcete se toho zúčastnit? Chcete vytvářet něco převratného? Studujte program Kybernetika a robotika a přidejte se k týmu Zdeňka Huráka!