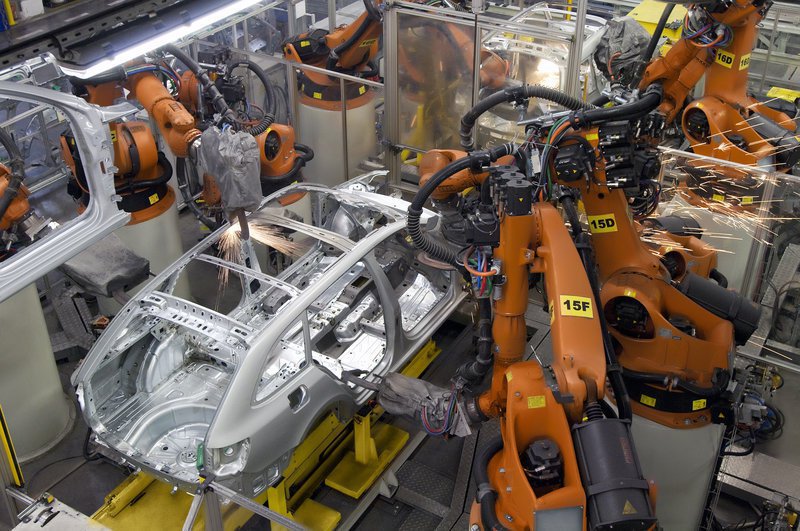
A typical welding production line in Škoda Auto contains 600 to 700 robots. These are grouped into separate cells, in which parts of the car body are welded, for example, a door pillar, a side wall, a partition wall, floor and such like. Each portion is composed of small parts, which have robots serving, and in most cases connected to, each other by resistance welding. Finished parts are passed between cells, either manually or by automatic conveyors and feeders, which happens mainly in cells called the “main production stream”.
Today's robots used in automobile production are equipped with energy-saving modes into which it is possible to convert the robot if not carrying out any operation. Typically, there are two saving modes, Standby and Hibernate. In Standby, consumption drops by about 30 percent, and in Hibernation up to 85 percent. Hibernation is suitable for longer periods, such as weekends, whilst standby is used for short breaks, as required, or lunch breaks. With the appropriate use of power-saving modes on weekends and during scheduled breaks we managed to save about 5 percent of total consumption in a robot cell. In the future, however, we can expect higher savings, especially with the development of technologies such as Profienergy, which is a standardized profile defining how to set up transitions between power modes. This profile is gaining support from the manufacturers of other devices. During a production break it would be possible to sleep additional devices as well as robots and thereby reduce consumption even more.