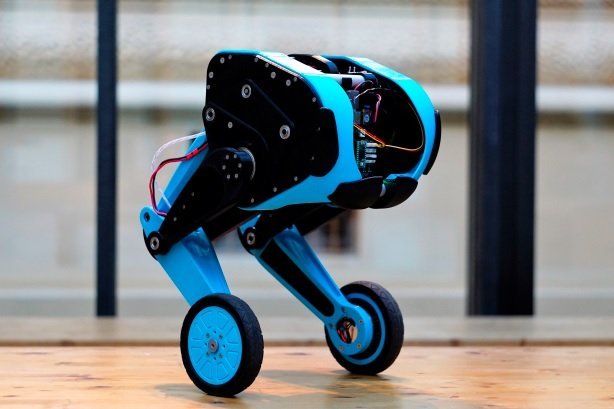
Diplomová práce Adama Kollarčíka se zabývá modelováním a řízením dvounohého robotu s koly. Cílem práce je vytvořit potřebné simulační nástroje pro návrh řídicího systému, návrh řídicího systému schopného stabilizace a řízení pohybu robotu, a nalézt vhodné trajektorie skoku. Nejdříve je odvozen nelineární planární model robotu za použití Euler-Lagrangeových rovnic. Navíc je k tomu vytvořeno 3D simulační prostředí v robotickém simulátoru Gazebo. Tyto 3D simulace jsou napříč prací použity jako hlavní verifikační a testovací nástroj. Poté je navržen řídicí systém skládající se ze dvou částí. Kola jsou řízena lineárně-kvadratickým regulátorem (LQR) s integrálním řízením navrženým na základě linearizovaného 3D modelu dvojkolého inverzního kyvadla. Nohy jsou řízeny dvěma proporčně-derivačními (PD) regulátory. Dále je implementován tzv. Unscented Kalman Filter (UKF) k odhadování stavů, a také na optimalizaci založená metoda určena k výpočtu trajektorie skoku. Navržené LQR a PD regulátory byly otestovány na reálném robotu a výsledky experimentů jsou zde také prezentovány.