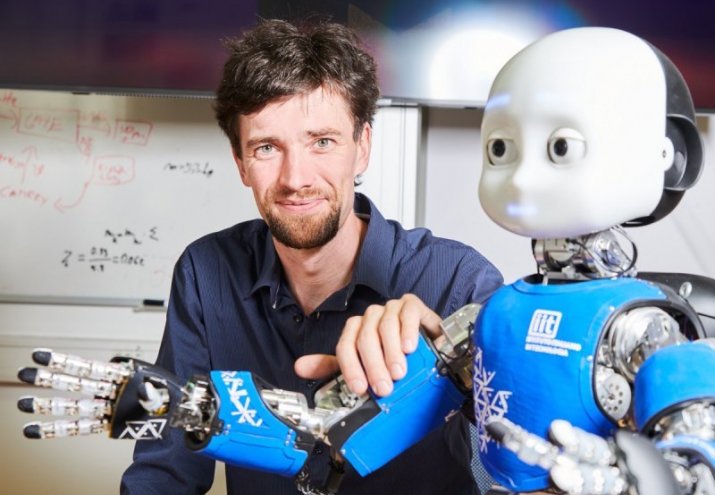
V KyR aplikujeme algoritmy inspirované mozkem, aby se roboti dokázali bezpečněji a autonomněji pohybovat mezi lidmi
Sestavu humanoidních robotů používaných k výzkumu i výuce v programu KyR rozšířil iCub, první robot vybavený všemi smysly. Jeho vlastnosti, zejména elektronická kůže, otevírají studentům i výzkumníkům programu KyR nové možnosti poznávání lidského mozku s pomocí umělé inteligence.

Učitelé Kybernetiky a robotiky pomáhali po zemětřesení v Itálii
Evropský výzkumný projekt TRADR, na kterém se podílejí učitelé Kybernetiky a robotiky, vyvíjí metody a technologie, které umožňují týmům lidí a robotů spolupracovat. Jedním z úkolů projektu TRADR je poskytnout informaci o místech, která jsou lidem nepřístupná při záchranných a vyhledávacích misích. Pro tento účel se používají mobilní roboty a drony.

Automatické testování elektroniky vozidel
Katedra měření dlouhodobě spolupracuje s oddělením vývoje elektriky a elektroniky vozidel společnosti Škoda Auto. Spolupráce se zaměřuje zejména na problematiku automatizovaného testování, která v současné době nabývá na významu vzhledem ke stále se rozšiřujícímu portfoliu uživatelských funkcí vozidel, jízdních asistentů, informačních a komunikačních systémů apod.
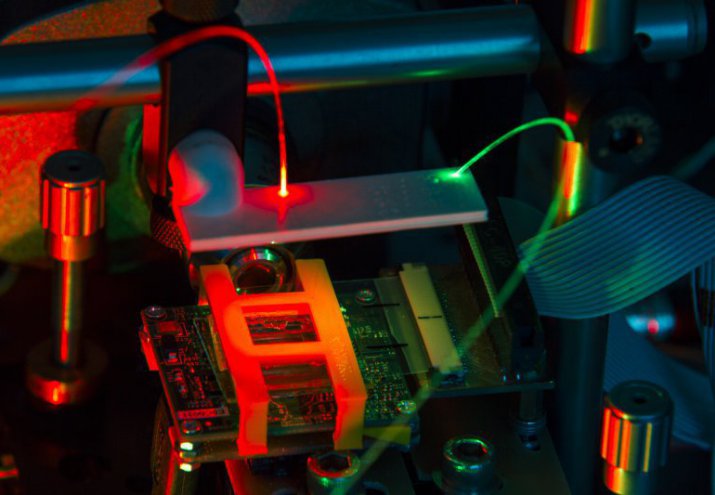
Řízení pro distribuovanou (mikro)manipulaci
Klasické robotické přístupy pro manipulaci s objekty, jako třeba uchopit nějaký předmět pomocí robotického manipulátoru a přemístit jej, mají svá omezení. Nehodí se například pro mikroskopické objekty či křehké rozměrné objekty a ani s nimi nelze realizovat manipulaci s mnoha předměty najednou, což motivuje výzkum v oblasti tzv. distribuované manipulace. Při distribuované manipulaci jsou pohony rozprostřené v prostoru místo toho, že by byly soustředěné v jednom či několika málo místech. Funkci takového manipulátoru lze připodobnit k chování davu fanoušků, kteří na koncertu nesou na rukou svou rockovou hvězdu poté, co ona mezi ně z pódia skočila (viz crowd surfing, stage diving). Zatímco na koncertě není třeba, aby manipulaci se zpěvákem někdo řídil, u technických zařízení se o to musí postarat nějaký systém. Výzkumem takových systémů se zabýváme ve skupině AA4CC na Katedře řídicí techniky, FEL.
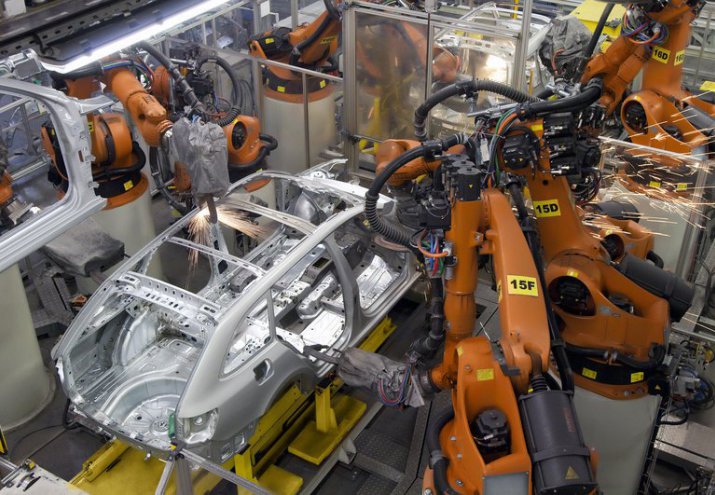
Snižujeme spotřebu energie robotů
Tým na katedře řídicí techniky ze skupin Průmyslové automatizace a Průmyslové informatiky se zabývá optimalizací spotřeby elektrické energie na robotických výrobních linkách ve svařovně společnosti Škoda Auto. Do projektu se intenzivně zapojují i studenti doktorského a magisterského studia.